Araña robótica con Arduino
Araña robótica con Arduino

Nuestro proyecto trata sobre conseguir un movimiento fluido a través de pequeñas maquinas eléctricas como son los servomotores,dirigidos por un controlador que en nuestro caso seria el Arduino, y ayudandonós para la distribución de ordenes de un driver especial y todo el sistema con la capacidad de ser dirigido remotamente con un controlador Bluetooth.
Arduino
Arduino como herramienta
educativa es muy útil y efectiva. Existen diferentes web con recursos,
tutoriales, trucos y ejercicios, además de existir tutoriales oficiales de
Arduino. La plataforma en sí misma tiene una gran comunidad a su alrededor
donde se puede encontrar muchos recursos, desde tutoriales para iniciarse desde
cero hasta aquellos destinados a usuarios más avanzados.

Módulo
Controlador de servos PCA9685 con Arduino
El controlador PCA9685 fue diseñado para controlar leds por PWM, pero también nos
permite controlar servos, ya que estos también se controlan por PWM, aplicación
que actualmente es muy usada.
El Módulo Controlador de servos PCA9685 tiene la placa diseñada para el control de servos, tiene los pines en el orden correcto para simplemente conectar los servomotores, además una bornera para la alimentación de los servos y conectores para la alimentación de la parte lógica junto con los pines I2C para comunicarse con arduino.
El Módulo Controlador de servos PCA9685 tiene la placa diseñada para el control de servos, tiene los pines en el orden correcto para simplemente conectar los servomotores, además una bornera para la alimentación de los servos y conectores para la alimentación de la parte lógica junto con los pines I2C para comunicarse con arduino.

 Bluetooth
Bluetooth
Creado de la placa de fibra de vidrio para nuestra araña para que reduzca el espacio y el peso.







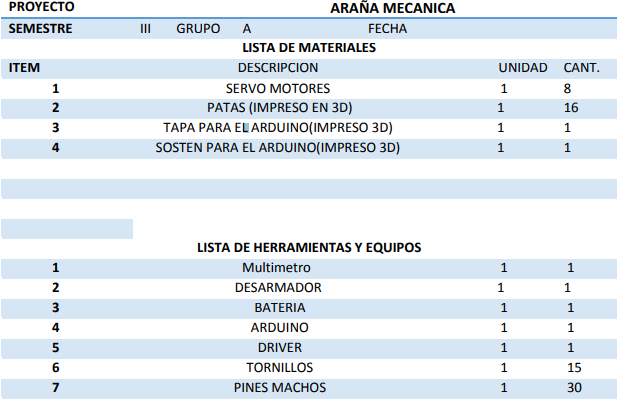
MATERIALES:
- Arduino UNO x1
- DRIVER x1
- Servo Controller 3 pins
- Microservo 9G (SG90) 8 SERVOS
- piezas en maquina 3D
- Batería 12 v o conector con polo a tierra
- Tornillos
Cálculos empleados para el diseño del hardware
En primer lugar es necesario destacar que se eligió trabajar con el microservo tower pro
MG90S que cuenta con las siguientes características especiales
Peso: 13.4 g
Dimensiones: 22,5 x 12 x 35,5mm aprox
Par de toque: 1.8 kgf·cm (4.8V), 2.2 kgf·cm (6 V)
Velocidad de operación: 0.1 s/60 grados (4.8 V), 0.08 s/60 grados (6 V)
Voltaje de operación: 4.8 V, 6.0 V
Ancho de banda muerta: 5us
Tipo de motor: Motor sin núcleo
Longitud de cable de conector: 175mm

VISUALIZACION DE PROYECTO A LOGRAR

Partes de nuestro proyecto




Adjuntamos el funcionamiento en un video
CREACIÓN DE LA APLICACIÓN

Fue a través de la página
del MIT dedicada a la creación sencilla de aplicaciones donde se diseñó el app
desde su apariencia y los comandos que esta, una vez instalado en el
dispositivo con el sistema de Android, sería capaz de enviar hacia el modulo Bluetooth
HC-06 de nuestro cuadrúpedo y así lograr que realice la secuencia de
movimientos que queramos.
Por lo primero que se hizo fue ingresar a la página
y crear un nuevo proyecto.

Teniendo
una vez el aspecto de nuestra aplicación pasaremos a el programa de esta, donde
declararemos que es lo que queremos que haga cada uno de los botones, en
nuestro caso solo deseamos que nos envíe una “letra” hacia el arduino, la cual
iniciara toda una secuencia predeterminada.

Cuando
tengamos la presentación del app junto con el programa que este realizará,
descargamos desde la página web, guardándolo en nuestra pc, para posteriormente
copiar el archivo (apk) a nuestro celular.
PROGRAMA:

Aquí podemos
visualizar los estados aplica cados a nuestros servomotores






Adjuntamos en el video la explicación del avance de la programación.
Adjuntamos en el video la explicación del 2° avance de la programación.
Logros:
-Obtuvimos gran habilidad en moldeado con calor, en manejar maquina 3D
-Obtuvimos habilidades de comunicación y trabajo en equipo.
-Logramos comunicarnos en equipo y manejar programas como rhynos , autocad, corel
draw.
DIFICULTADES
-Hacer muchas pruebas para conocer el angulo de operación en que los servos puedan trabajar sin sobre-esforzarse
-El no tener conocimiento de muchas funciones de programas y maquinas.
-El trabajo manualmente, ya que al no tener práctica, cometimos errores.
- El trabajo con maquinas, no tener experiencia en usarlas.
-Materiales, como la bateria que alimente todo los servo motores.

Integrantes:
- Jeremy Ray Chahuayo Carrillo
- Jeancarlo Cuadros Sandhaus
- Jefri Aquima Garcia


Este comentario ha sido eliminado por el autor.
ResponderEliminarHola, soy de la escuela industrial de Rio Negro y estamos por realizar un proyecto similar a este. Queríamos saber nos podrían decir las medidas de la estructura de la araña y si tienen algún plano de la conexión de los servos a la placa de arduino
ResponderEliminar